fhntv, > гиродатчик участвует в логике программы которая написана так чтобы человек не упал, а это достижимо только сочетанием угла наклона и уровня тока на моторе
Слова умные, а смысла маловато.
У человека есть своя программа, он не падает и без гироскутера, а вот с гирика навернуться - на раз.
Там нет никакой программы, и углов тоже нет.
Отклонился - пошла тяга, начался разгон - интуитивно уменьшаешь отклонение, уменьшается тяга.
Под горку или в гору - гирику все равно, он получает команду от человека посредством позиционарования платформы и гиродатчика.
Был бы чуточку умнее - догадался бы, что если поставить на гирик мешок картошки - то никто никуда не поедет и ника4ого равновесия твоя программа не удержит.
при превышении параметров происходит отрубас , у тебя превышение по тяговому усилию ,
Тоже сначала так подумала, ан нет.
Отрубаса не происходит, срабатывает тревога, а гирик продолжает тянуть.
Отрубас только при превышении угла наклона.
То есть когда гирик «понимает» что уже приехали.
ччего ?
Там нет трехфазного тока в классическом понимании.
Некое подобие, последовательное переключение, и не синус, а меандр.
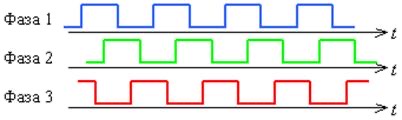
Хотя возможно я ошибаюсь, проверять осцилографом лень.
дать пинка твоим бенгальцам
Твой махровый расизм ни разу не смешОн, мои верные слуги выполняют свою работу и пинать их нет никаких оснований.
Мишутк,
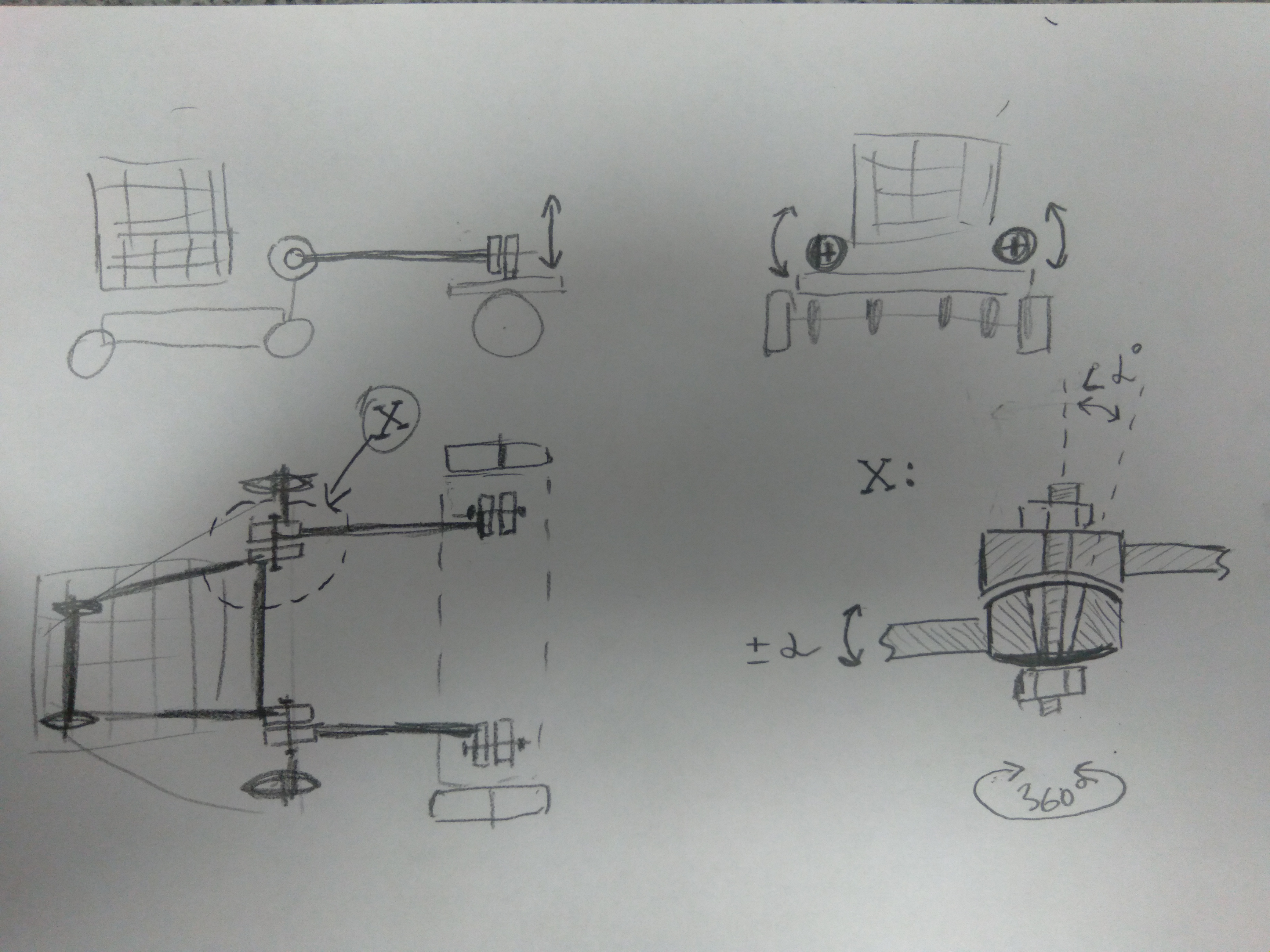
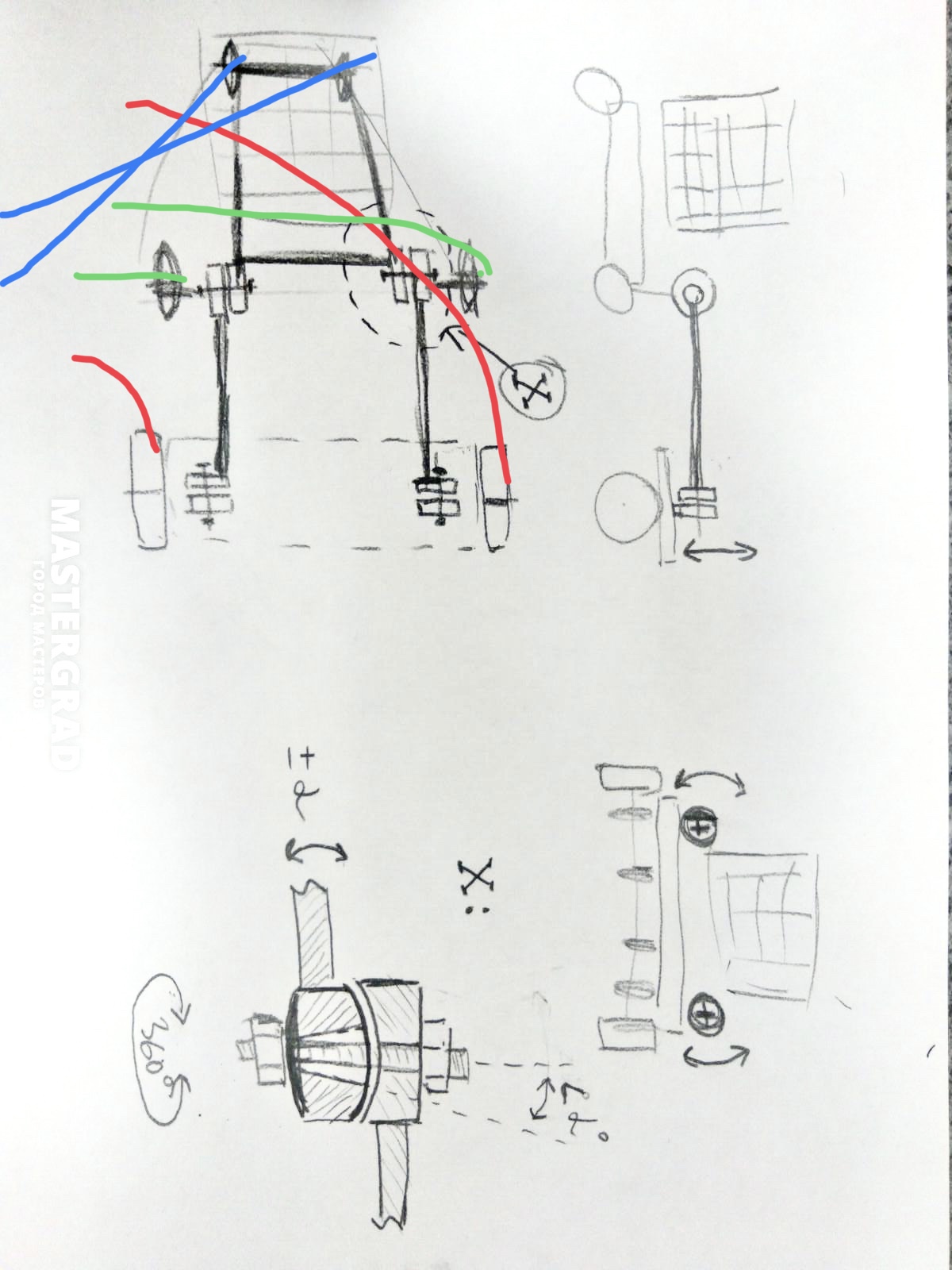
В данном случае очень помогает лист бумаги и карандаш.
Я не смогла понять или представить суть Вашего предложения, нарисуйте пожалуйста.
Если ось привода одна и передних колес вторая + шарнир горизонтальный - то получится параллельность передней и задней оси.
При дороге формы “Мёбиус” будет три точки контакта, за счет чего скручивание осей произойдет?
Нет, тут решение простое и отработанное, как у автомобиля «запорожец»
Два задних подпружиненных рычага, независимая подвеска, и передняя «ось» из двух свободных колес, с минимальным скручиванием за счет эластичности рамы тележки.